Stock photos provided by the manufacturers may not represent the actual item. Please verify this picture accurately reflects the product described by the title and description before you place your order.
QHY GPS BOX
- Manufacturer: QHY
- MPN: GPS BOX
- SKU: QHY GPS BOX
- Last price was: $300.00
-
Availability: Backorder
Click here if you want to be notified as soon as we get this product in stock again.
The QHY-GPSBOX is a compact camera accessory that provides high-precision GPS hardware time scales allowing some QHYCCD cameras to obtain accurate time information of the camera's exposure time. In addition, this information is returned to the camera internally and added to the image data after the start of one frame of the image. GPS timing information and image information are therefore completely consistent. No confusion is created due to transmission, buffering or other reasons. It is very convenient to use and read.

The QHY-GPSBOX has a built-in GNSS module and can currently provide both pure GPS operation and GPS/Beidou dual-mode operation. The latter can be set to work in GPS mode or Beidou mode through software. The GPSBOX also contains a local 10MHz voltage controlled crystal oscillator (VCXO) that provides an internal 0.1us resolution timing clock. At the same time, the timing clock is reset by the PPS model of the GNSS module. Therefore, the clock and the GNSS system’s second start time are strictly aligned, and the error is within a range of 20ns to 100ns.
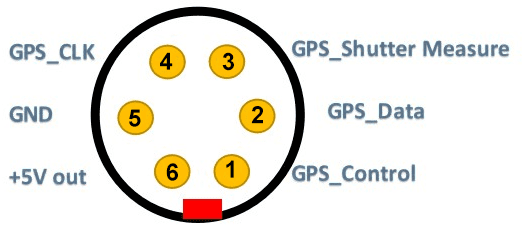
QHY-GPSBOX and camera are connected by 6-pin aviation plug. Contains the following signals:
| Pin | Function | Description |
| 1 | Gnd | |
| 2 | Communication clock. Level 1.8V or 2.5V |
Output to GPSBOX by camera. Frequency <= 40MHz |
| 3 | Communication data. Level 1.8V or 2.5V |
Single-wire serial communication using synchronous feature head + data mode. |
| 4 | Configuration Data Level 1.8V or 2.5V |
Beidou / GPS selection |
| 5 | Measure the waveform Level 1.8V or 2.5V |
The camera measures the waveform based on the electronic shutter generated by the image sensor drive and outputs it to the GPSBOX |
| 6 | + 5V | Camera output power supply |
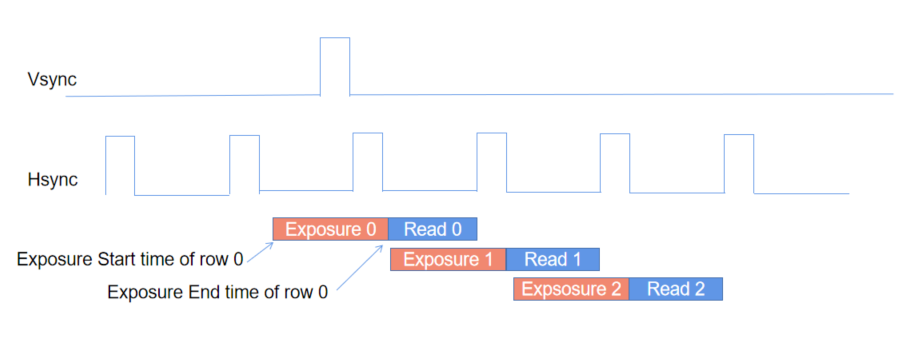
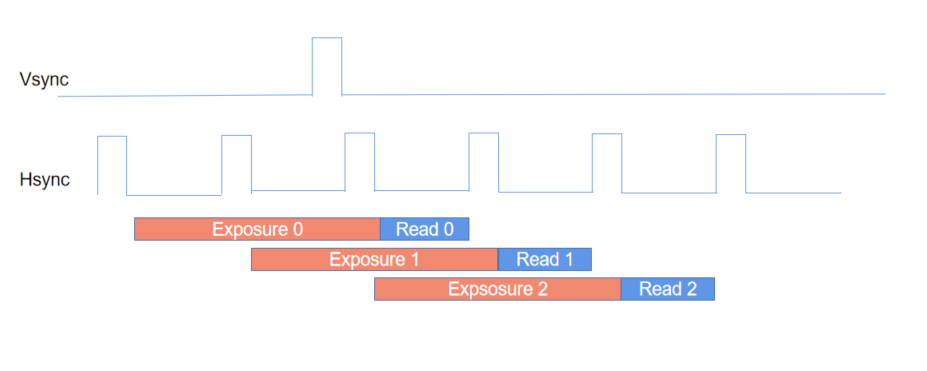
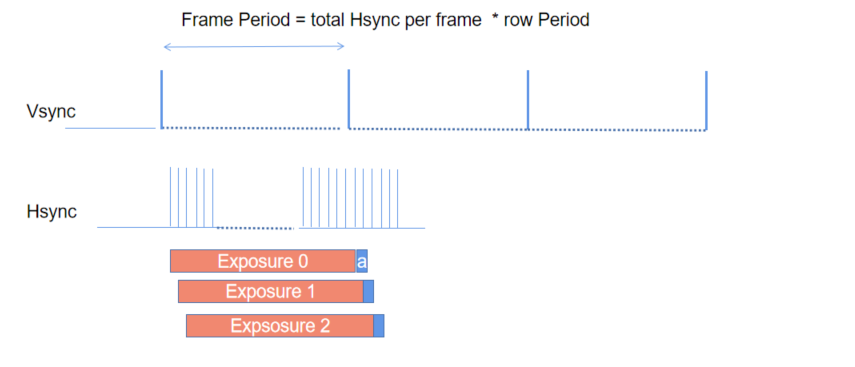
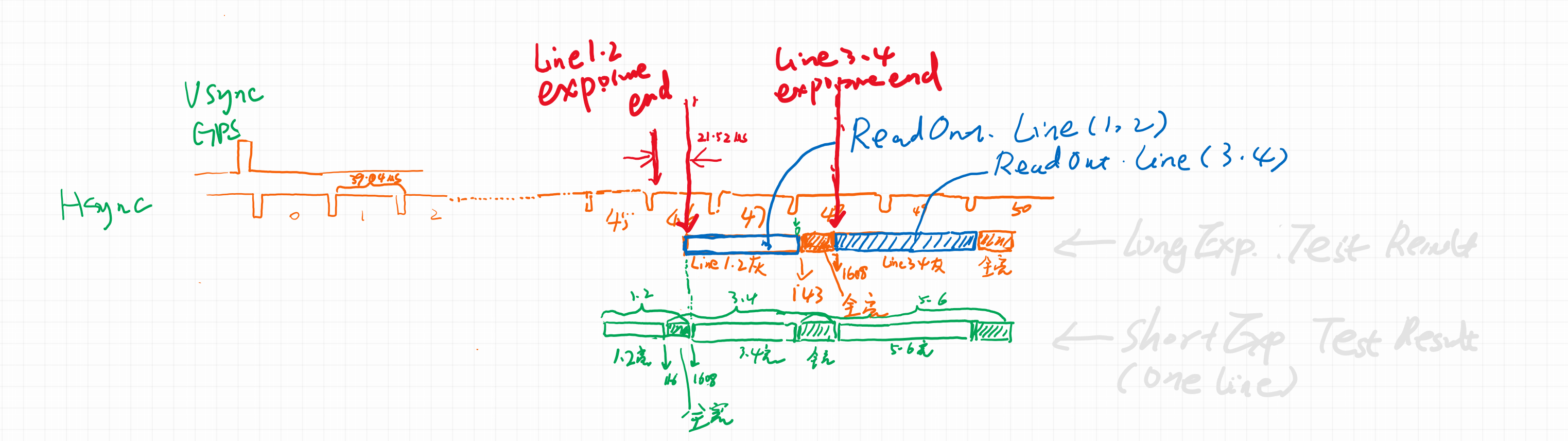
Note that when choosing a camera, you must specify the special version with a GPS socket. The socket used in the standard version is a 5-core aviation socket. When the camera is working, an electronic shutter measurement waveform is generated every frame. The waveform is output to the GPSBOX. After the GPSBOX performs high-precision time measurement, it outputs a serial header data and sends it back to the camera. The camera records these data after the frame header of each frame (replacing some pixel values in the first few lines)
QHYGPS has a perfect fault tolerance mechanism. It can deal with the situation when the PPS signal is lost. If the PPS signal is lost, after 50.0us, an internal second step will be used. And this information will be recorded. For timing information without a PPS signal, a cumulative timing error of 50us per second will be generated. When the PPS signal is restored, the PPS signal will be used again to reset the internal timer. Therefore, it has GPS timing accuracy after recovery and will not accumulate previous errors.
The QHYGPS will also output a GPS measurement value of an internal 10MHz clock every second. This measurement value can be used to accurately calibrate the frequency of the internal 10MHz crystal oscillator in later software to avoid an internal 10MHz crystal oscillator error and temperature drift.
Currently ONLY the following models have 6-pin aviation plug which supports GPSBOX (without further modification).
QHY600 Pro
QHY268Pro
QHY4040
QHY4040Pro
QHY6060
QHY42Pro
QHY411
QHY461
Other models don’t have a 6-pin plug but can be modified to be compatible with the QHY-GPSBOX. Please contact QHYCCD for such requirments.